華信光電將參加日本國際雷射加工技術展 Photonix 2016, 歡迎您的來訪!!
聚焦地科
聚焦地科2021-07-11
水下探測載具-ROV系統簡介
水下探測載具
ROV系統簡介
為符合台灣周遭海域深海探測與水下工程之作業需求,海洋中心建置一套3,000公尺級深海工作型ROV,並培育維運團隊具之自主深海操作技術,可提供並建立一深海研究互動作業平台。工作型ROV具備深海觀測與樣品採集能力,各類應用可包含:海洋能源探勘、海底纜線勘查、科研設備安裝修復、事故偵查搜尋等。
ROV系統基本組成
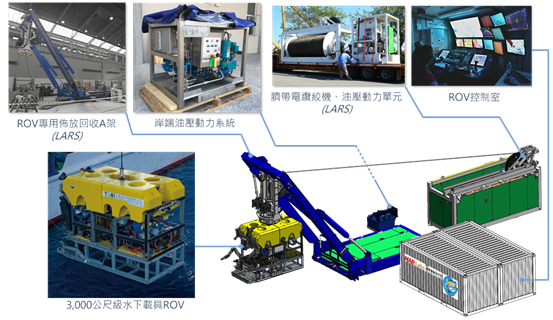
本中心之ROV系統為英國Forum Subsea Technologies之產品,型號為Triton XLX 56,其已針對海洋研究需求加裝各種科學探測儀器,ROV常態安裝兩組油壓機械手臂且可額外提供250公斤之負載(扣除下掛式工具籃之重量後),屬深海工作型ROV系統。整體系統可簡單劃分為ROV本體、ROV 控制室(Control Room)與ROV專用佈放回收系統(Launch and Recovery System, LARS)等三大部份,以下做簡單介紹。
l 為提供足夠的推進效能,ROV具備可輸出150匹馬力的油壓系統,以推動8組油壓推進器(Thruster)與2組機械手臂。推進器為水平4組、垂直4組,另外機械手臂包含可提供454公斤舉重能力的Schilling Titan 4,以及具備力回饋功能(Force Feedback)的Kraft Predator。
l 配置11組水下攝影機與1組照相機,提供不同角度的影像即時回傳,其中包含HD高畫質攝影機3組,可支援高畫質的影像攝錄工作。另外ROV前方具備4組400 W鹵素燈,協助攝影機還原海底真實的色彩。
l 在能見度不佳的水域可協助駕駛員判別前方障礙物的避障聲納(Scanning Sonar)。
l 水下定位系統(Ultra-Short BaseLine, USBL)與深海尋標聲納(Homer)分別以聲波傳遞的方式執行工作母船勵進與ROV本體間的定位,以及ROV與水下目標物間的定位等工作。
l 計算飛行姿態與移動速度,使ROV能在海床進行地毯式探索的慣性導航儀(Inertial Navigation System, INS)與都卜勒聲納(Doppler Velocity Log, DVL)。

ROV本體掛載多項科學探測儀器
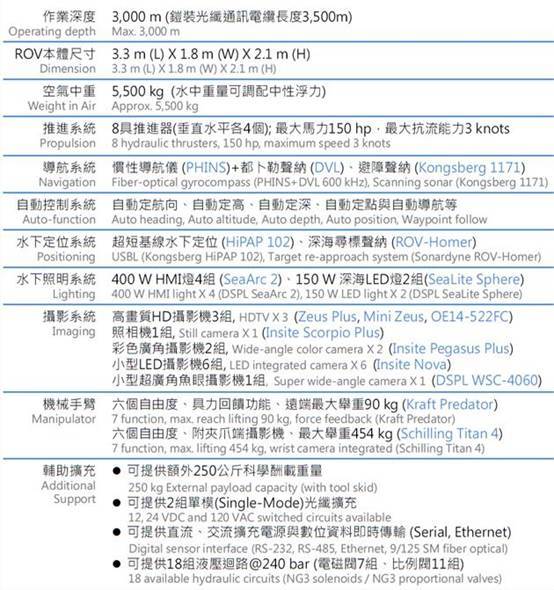
ROV規格
由於ROV本體沒有規劃空間放置海底樣品,為此本中心ROV團隊自行研發設計製造一組符合ROV系統使用的下掛式工具籃(Tool Sled),此工具籃具備1組前油壓伸縮抽屜(Tool Tray)和2組旋轉臂(Swing Arm),提供額外可靈活運用的深海樣品收納空間,ROV與下掛式工具籃整合後,可滿足多功能工作型ROV額外加裝各種探測儀器或放置不同採集樣品的需求。
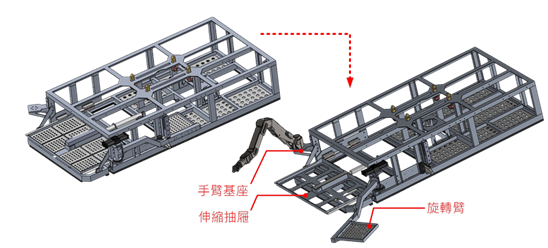
ROV專用下掛式工具籃
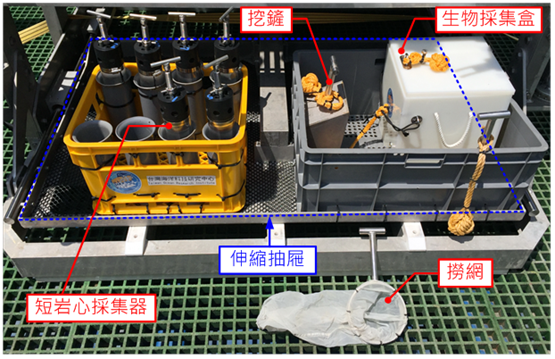
伸縮抽屜可放置各種採集器,包含挖鏟一組、撈網三組、短岩心採樣器(Push Core)八組與生物採集盒(Bio Box)一個。
ROV內部的油壓馬達為水冷式設計,需要大量海水冷卻才可順利運作,因此在岸上無法開啟,當需要進行ROV油壓設備測試時(如推進器或機械手臂),可使用岸端油壓動力系統(Charge Cart)外部供給油壓協助進行。

岸端油壓動力系統
2. ROV控制室
ROV控制室為發號控制命令與接收相關感測器資訊的場域,其由2個20呎貨櫃所組成,依特性劃分成(1)影像資料顯示區、(2)駕駛操作區、(3)光纖訊號轉換區、(4)電力控制區及(5)科學觀測與錄影區。ROV駕駛員透過控制室內部的13組螢幕,觀看即時由ROV回傳的深海影像,同時搭配電子海圖、水下定位系統與聲納系統的顯示畫面,提供駕駛員足夠的導航資訊。
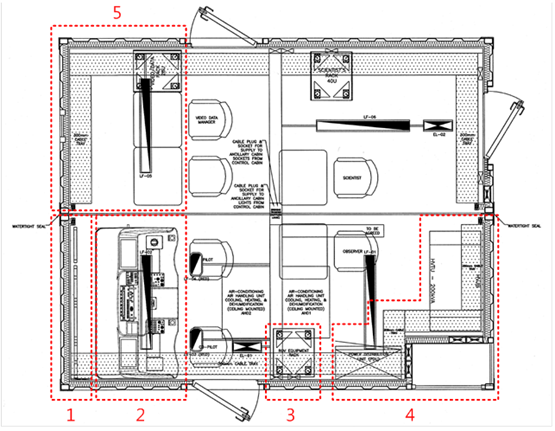
ROV控制室平面圖 (1)影像資料顯示區; (2) 駕駛操作區; (3) 光纖訊號轉換區; (4) 電力控制區; (5) 科學觀測與錄影區

ROV駕駛員於控制室內部進行操控
3. ROV專用佈放回收系統
LARS是佈放與回收ROV最重要的設備,一套完整的LARS由油壓動力單元(Hydraulic Power Unit, HPU)、光纖臍帶電纜絞機(Optical Umbilical Winch)與佈放回收A架(A-Frame)所組成。
l 油壓動力單元負責供給油壓動力,其內部2組75 KW電動馬達推動油壓泵可輸出高壓動力驅動光纖臍帶電纜絞機與佈放回收A架,堪稱整套LARS的核心設備。
l 光纖臍帶電纜絞機是中繼ROV控制室與本體的一項重要設備,其中光纖臍帶電纜(Umbilical)外部包覆兩層鋼絲可負荷ROV本體重量,透過內部的單模光纖(Single Mode Fiber)與多芯銅導線(Cooper Conductor)可將控制室內的指令與電力完整傳遞至ROV本體。
l 佈放回收A架可分為A架本體與定向收放裝置(Docking Head)兩項,A架本體荷載為8噸,其主要協助ROV進行甲板與船舷間的移動,而A架本體上方的定向收放裝置則負責維護ROV在吊掛期間的安全,在佈放的時候,ROV由光纖臍帶電纜絞機上收,定向收放裝置內部的門閂夾爪(Latch)便會抓取ROV,並利用下方的圓型轉盤增加ROV的吊掛時的穩定度,此時A架本體便會往外轉出,待ROV移動到海面上後便可下放入水,反之亦然。
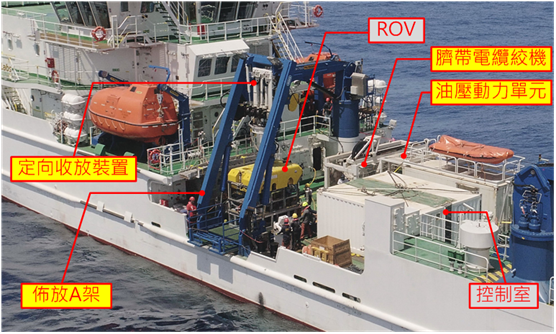
LARS系統於勵進研究船甲板之配置

ROV執行夜間佈放工作
ROV系統與勵進研究船實海整合測試
2018年5月勵進研究船加入臺灣海洋科學探測行列,提供大型海洋設備一個發揮的舞台,本中心於2018年初便開始規劃勵進返台後一連串實海測試航次,當中亦包含ROV實海測試航次。2018年完成的ROV潛航測試任務中,最深下潛深度達1,196公尺,雖尚未達到ROV可作業深度(3,000公尺)之一半,但值得注意的是,有別於過往尋求國外ROV專家協助之慣例,所有ROV操作與維修工作皆由本中心ROV團隊完成,並與本中心大洋探測團隊、勵進操船團隊齊力合作,從佈放與回收、作業點位選定、水下定位操作與海底地形圖資料提供等,順利完成ROV實海探測任務,達成的工作項目包含深海生物觀察與紀錄、機械手臂採樣、下掛式工具籃測試、ROV自動水下飛行、探尋天然氣水合物,並完整記錄深海中海底泥火山氣體噴發之樣貌與成功尋獲海洋中心佈放於海床之海底地震儀。
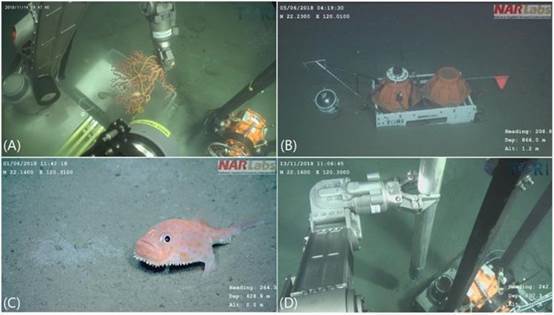
各種ROV海底任務 (A)珊瑚採樣;(B)地震儀探訪;(C)生物觀測;(D)機械手臂輔助震盪式岩心採集器採樣
原文轉載自國家實驗研究院台灣海洋科技研究中心【2021-03-19/核心設施 水下探測載具】
https://www.tori.narl.org.tw/cContent.aspx?sNode=cROV
ROV系統簡介
為符合台灣周遭海域深海探測與水下工程之作業需求,海洋中心建置一套3,000公尺級深海工作型ROV,並培育維運團隊具之自主深海操作技術,可提供並建立一深海研究互動作業平台。工作型ROV具備深海觀測與樣品採集能力,各類應用可包含:海洋能源探勘、海底纜線勘查、科研設備安裝修復、事故偵查搜尋等。
ROV系統基本組成
本中心之ROV系統為英國Forum Subsea Technologies之產品,型號為Triton XLX 56,其已針對海洋研究需求加裝各種科學探測儀器,ROV常態安裝兩組油壓機械手臂且可額外提供250公斤之負載(扣除下掛式工具籃之重量後),屬深海工作型ROV系統。整體系統可簡單劃分為ROV本體、ROV 控制室(Control Room)與ROV專用佈放回收系統(Launch and Recovery System, LARS)等三大部份,以下做簡單介紹。
- ROV本體
l 為提供足夠的推進效能,ROV具備可輸出150匹馬力的油壓系統,以推動8組油壓推進器(Thruster)與2組機械手臂。推進器為水平4組、垂直4組,另外機械手臂包含可提供454公斤舉重能力的Schilling Titan 4,以及具備力回饋功能(Force Feedback)的Kraft Predator。
l 配置11組水下攝影機與1組照相機,提供不同角度的影像即時回傳,其中包含HD高畫質攝影機3組,可支援高畫質的影像攝錄工作。另外ROV前方具備4組400 W鹵素燈,協助攝影機還原海底真實的色彩。
l 在能見度不佳的水域可協助駕駛員判別前方障礙物的避障聲納(Scanning Sonar)。
l 水下定位系統(Ultra-Short BaseLine, USBL)與深海尋標聲納(Homer)分別以聲波傳遞的方式執行工作母船勵進與ROV本體間的定位,以及ROV與水下目標物間的定位等工作。
l 計算飛行姿態與移動速度,使ROV能在海床進行地毯式探索的慣性導航儀(Inertial Navigation System, INS)與都卜勒聲納(Doppler Velocity Log, DVL)。
ROV本體掛載多項科學探測儀器
ROV規格
由於ROV本體沒有規劃空間放置海底樣品,為此本中心ROV團隊自行研發設計製造一組符合ROV系統使用的下掛式工具籃(Tool Sled),此工具籃具備1組前油壓伸縮抽屜(Tool Tray)和2組旋轉臂(Swing Arm),提供額外可靈活運用的深海樣品收納空間,ROV與下掛式工具籃整合後,可滿足多功能工作型ROV額外加裝各種探測儀器或放置不同採集樣品的需求。
ROV專用下掛式工具籃
伸縮抽屜可放置各種採集器,包含挖鏟一組、撈網三組、短岩心採樣器(Push Core)八組與生物採集盒(Bio Box)一個。
ROV內部的油壓馬達為水冷式設計,需要大量海水冷卻才可順利運作,因此在岸上無法開啟,當需要進行ROV油壓設備測試時(如推進器或機械手臂),可使用岸端油壓動力系統(Charge Cart)外部供給油壓協助進行。
岸端油壓動力系統
2. ROV控制室
ROV控制室為發號控制命令與接收相關感測器資訊的場域,其由2個20呎貨櫃所組成,依特性劃分成(1)影像資料顯示區、(2)駕駛操作區、(3)光纖訊號轉換區、(4)電力控制區及(5)科學觀測與錄影區。ROV駕駛員透過控制室內部的13組螢幕,觀看即時由ROV回傳的深海影像,同時搭配電子海圖、水下定位系統與聲納系統的顯示畫面,提供駕駛員足夠的導航資訊。
ROV控制室平面圖 (1)影像資料顯示區; (2) 駕駛操作區; (3) 光纖訊號轉換區; (4) 電力控制區; (5) 科學觀測與錄影區
ROV駕駛員於控制室內部進行操控
3. ROV專用佈放回收系統
LARS是佈放與回收ROV最重要的設備,一套完整的LARS由油壓動力單元(Hydraulic Power Unit, HPU)、光纖臍帶電纜絞機(Optical Umbilical Winch)與佈放回收A架(A-Frame)所組成。
l 油壓動力單元負責供給油壓動力,其內部2組75 KW電動馬達推動油壓泵可輸出高壓動力驅動光纖臍帶電纜絞機與佈放回收A架,堪稱整套LARS的核心設備。
l 光纖臍帶電纜絞機是中繼ROV控制室與本體的一項重要設備,其中光纖臍帶電纜(Umbilical)外部包覆兩層鋼絲可負荷ROV本體重量,透過內部的單模光纖(Single Mode Fiber)與多芯銅導線(Cooper Conductor)可將控制室內的指令與電力完整傳遞至ROV本體。
l 佈放回收A架可分為A架本體與定向收放裝置(Docking Head)兩項,A架本體荷載為8噸,其主要協助ROV進行甲板與船舷間的移動,而A架本體上方的定向收放裝置則負責維護ROV在吊掛期間的安全,在佈放的時候,ROV由光纖臍帶電纜絞機上收,定向收放裝置內部的門閂夾爪(Latch)便會抓取ROV,並利用下方的圓型轉盤增加ROV的吊掛時的穩定度,此時A架本體便會往外轉出,待ROV移動到海面上後便可下放入水,反之亦然。
LARS系統於勵進研究船甲板之配置
ROV執行夜間佈放工作
ROV系統與勵進研究船實海整合測試
2018年5月勵進研究船加入臺灣海洋科學探測行列,提供大型海洋設備一個發揮的舞台,本中心於2018年初便開始規劃勵進返台後一連串實海測試航次,當中亦包含ROV實海測試航次。2018年完成的ROV潛航測試任務中,最深下潛深度達1,196公尺,雖尚未達到ROV可作業深度(3,000公尺)之一半,但值得注意的是,有別於過往尋求國外ROV專家協助之慣例,所有ROV操作與維修工作皆由本中心ROV團隊完成,並與本中心大洋探測團隊、勵進操船團隊齊力合作,從佈放與回收、作業點位選定、水下定位操作與海底地形圖資料提供等,順利完成ROV實海探測任務,達成的工作項目包含深海生物觀察與紀錄、機械手臂採樣、下掛式工具籃測試、ROV自動水下飛行、探尋天然氣水合物,並完整記錄深海中海底泥火山氣體噴發之樣貌與成功尋獲海洋中心佈放於海床之海底地震儀。
各種ROV海底任務 (A)珊瑚採樣;(B)地震儀探訪;(C)生物觀測;(D)機械手臂輔助震盪式岩心採集器採樣
原文轉載自國家實驗研究院台灣海洋科技研究中心【2021-03-19/核心設施 水下探測載具】
https://www.tori.narl.org.tw/cContent.aspx?sNode=cROV